|
I am a postdoctoral researcher at PAVIS, Istituto Italiano di Tecnologia (IIT), Genova, Italy, working with Dr. Alessio Del Bue. I am working on a research problem, estimating the 3D keypoints for deformable objects in a self-supervised way. I have done my PhD from the same (PAVIS) lab on March 27th, 2023, where I have desinged deep leanring networks to estimate 3D keypoints for rigid objects considering 2D and 3D data. my_page@IIT / LinkedIn / Google Scholar / Github / Google-site / Email |

|
|
|
|
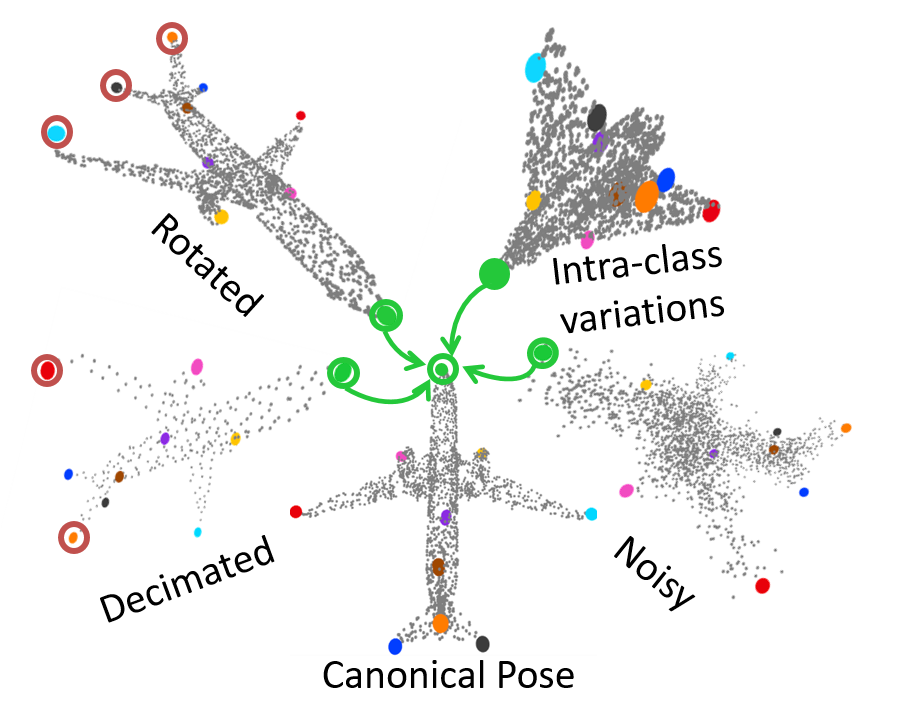
Mohammad Zohaib, Alessio Del Bue ICCV, 2023 PDF / Code The paper presents a self-supervised approach to estimate 3D keypoints that are semantically coherent, proximal to PCD surface and resilient to PCD perturbations. |
|
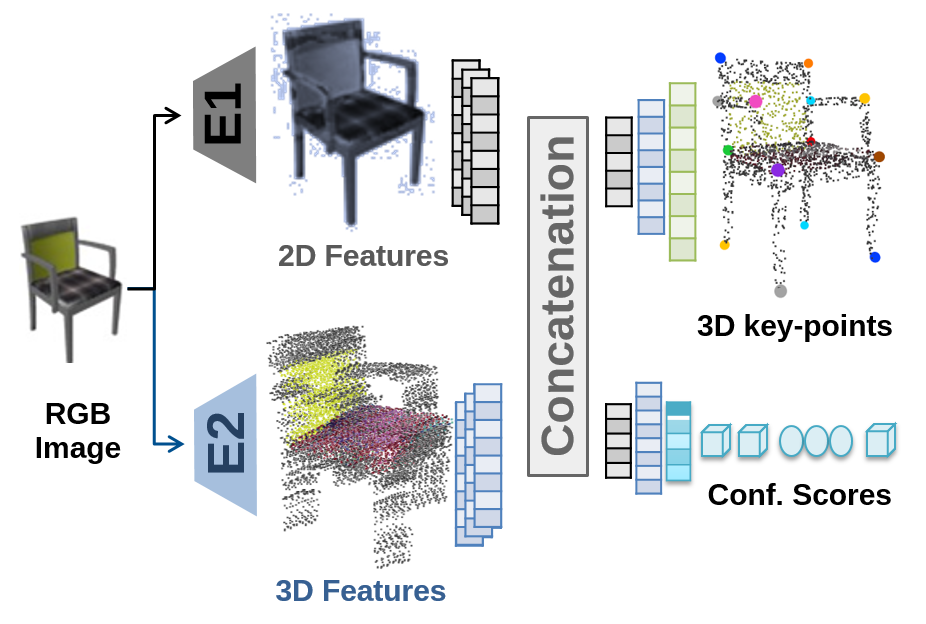
Mohammad Zohaib, Milind G. Padalkar, Pietro Morerio, Matteo Taiana, Alessio Del Bue Pattern Recognition, 2023 , Under review The paper presents a teacher-student network that hallucinates 3D features directly from RGB images to improve the keypoints localization. |
|
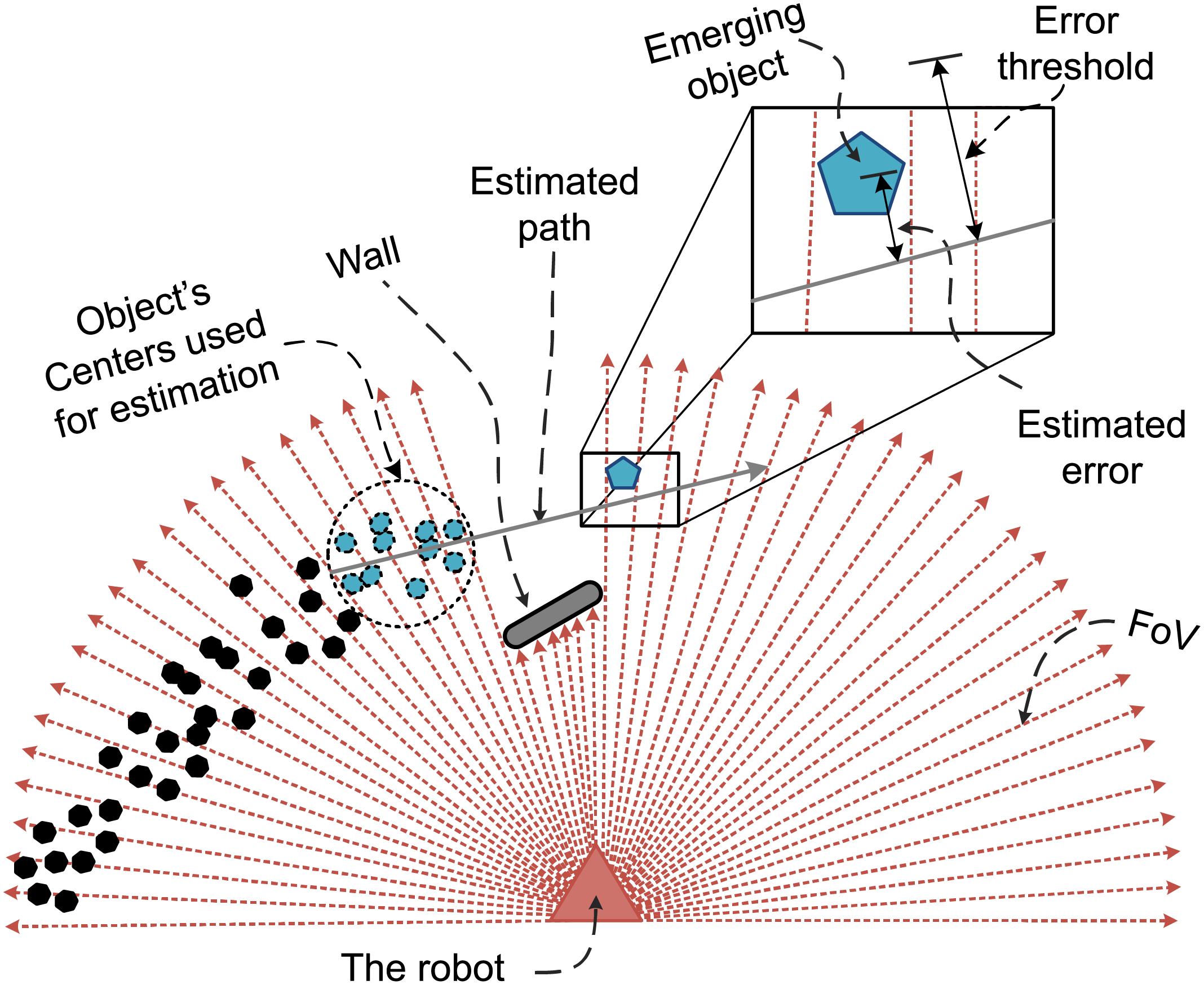
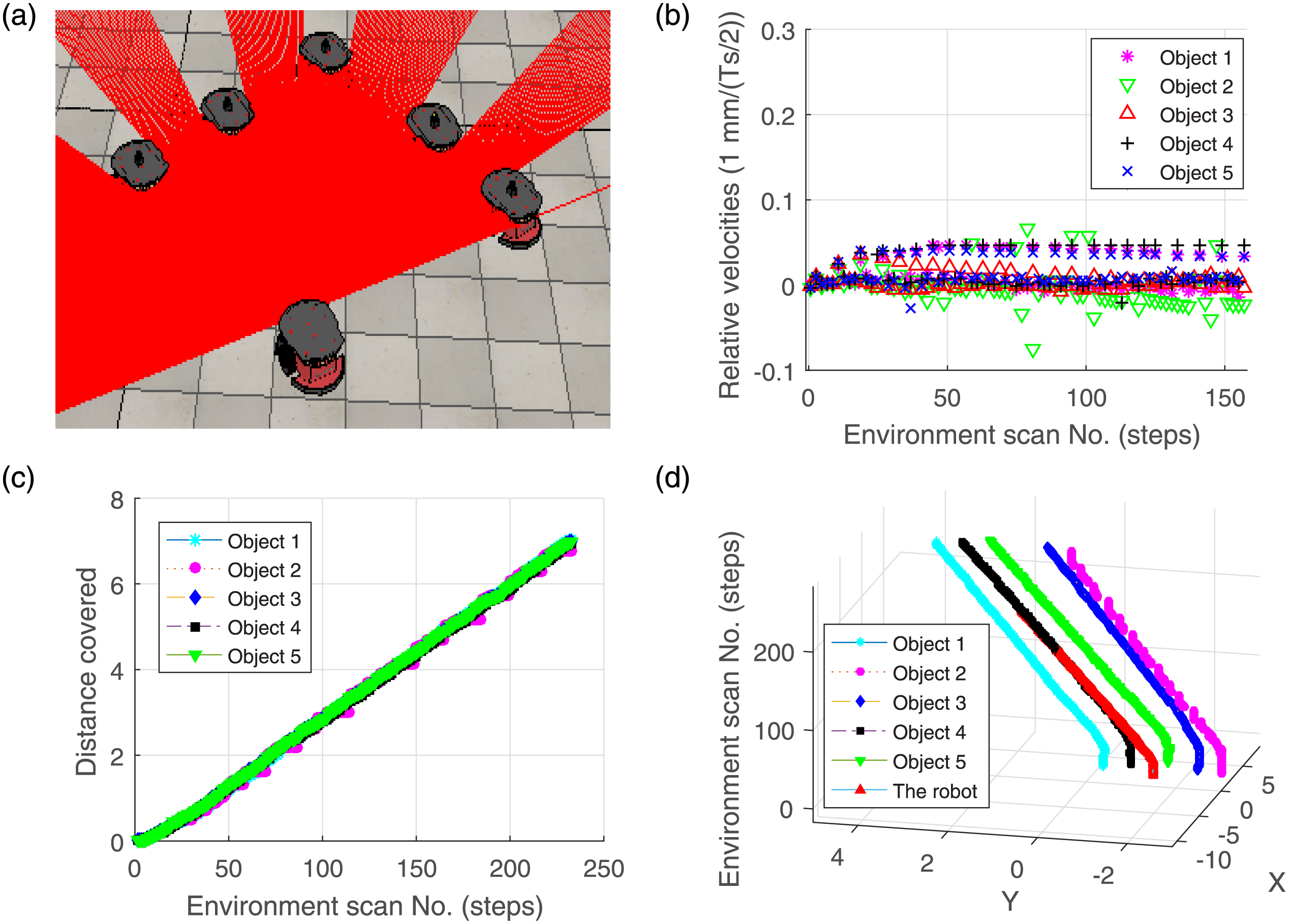
Mohammad Zohaib, Muhammad Ahsan Public Library of Science (PLoS) ONE journal, 2023 PDF / This work presents a ROS-based algorithm for constructing dynamic maps, which exploits the spatial-temporal locality for detecting and tracking moving objects without relying on prior knowledge of their geometrical features. |

|
Mohammad Zohaib, Matteo Taiana, Milind G. Padalkar, Alessio Del Bue ICIAP, 2022 [Oral presentation] PDF / Sup. Material / Video Our paper presents an end-to-end approach that leverages single-view RGB images for estimating an ordered list of 3D keypoints. |
|
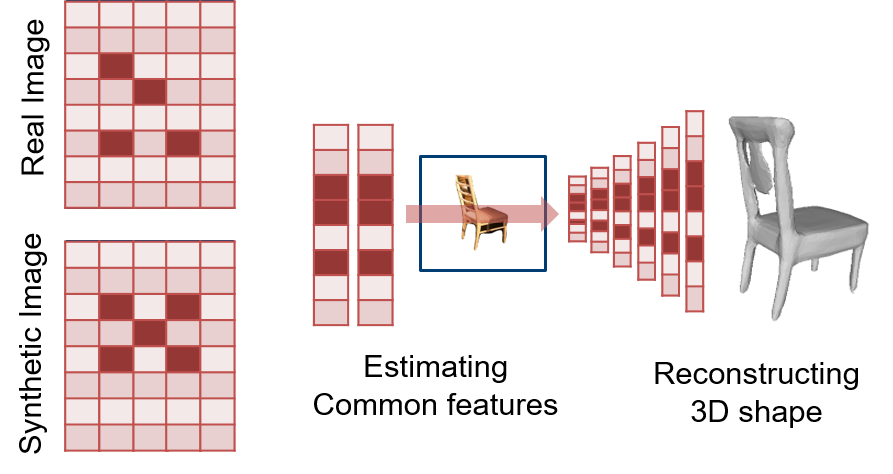
Mohammad Zohaib, Matteo Taiana, Alessio Del Bue ICIAP, 2022 PDF / Sup. Material / Poster / Video Our paper presents an end-to-end 3D reconsturction approach that learns to compute stable features for an object by reducing the influence of image background. |
|
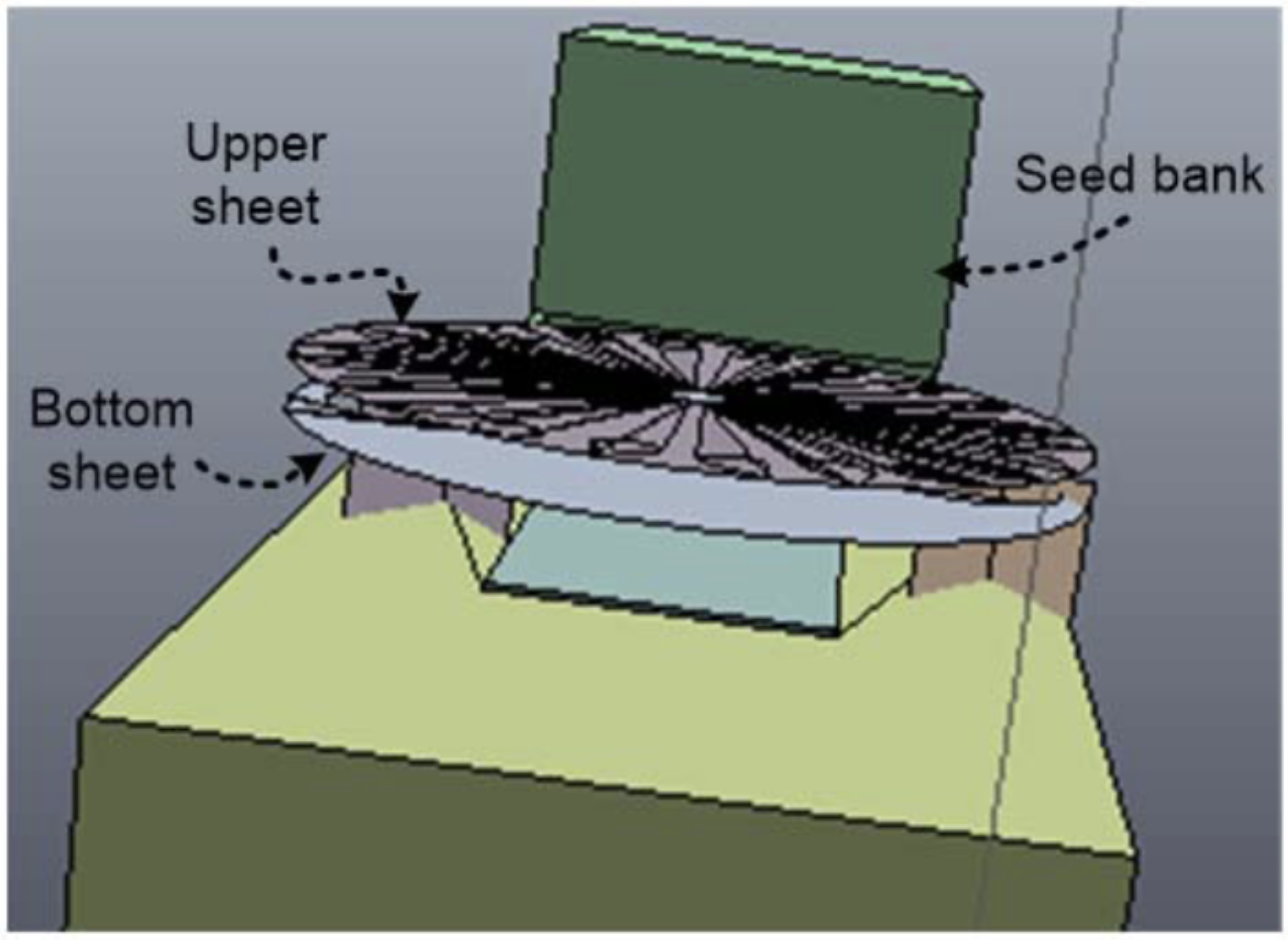
Amir Asghar Ali, Mohammad Zohaib, Syed Atif Mehdi ICRAI, 2019 The paper presents an autonomous seeder robot that minimizes human involvement in the sowing process; thus, it reduces errors and time consumption and increases efficiency. |
|
Website built using source code provided by Jon Barron. Last updated on: |